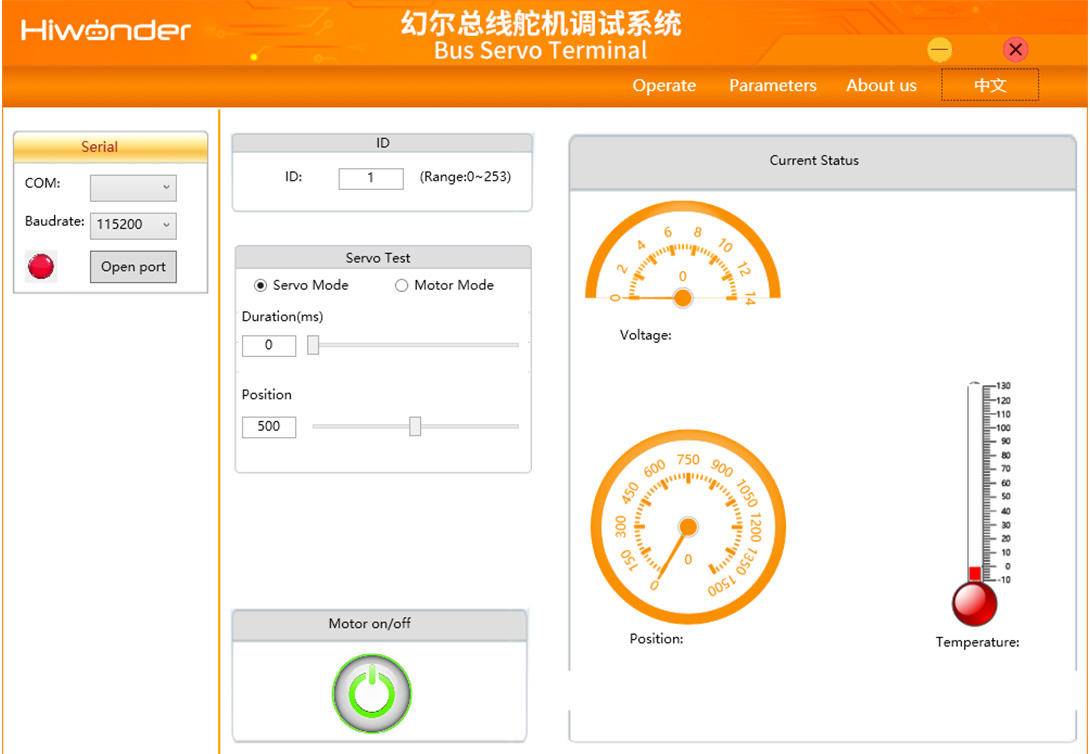
With our servo debugging tool, you can easily configure the servo ID, operating mode, speed, position offset, and set alarms for stall and low voltage. You can also adjust LED light, temperature, and speed. Th graphical interface allows you to adjust each servo’s angle with a simple drag-and-drop, making it quick and easy to create motion files and enhance debugging efficiency.
This tool allows you to control servos in real-time, with live monitoring of important data like position, voltage, and temperature. It's perfect for testing and troubleshooting, ensuring your servos run smoothly and reliably.

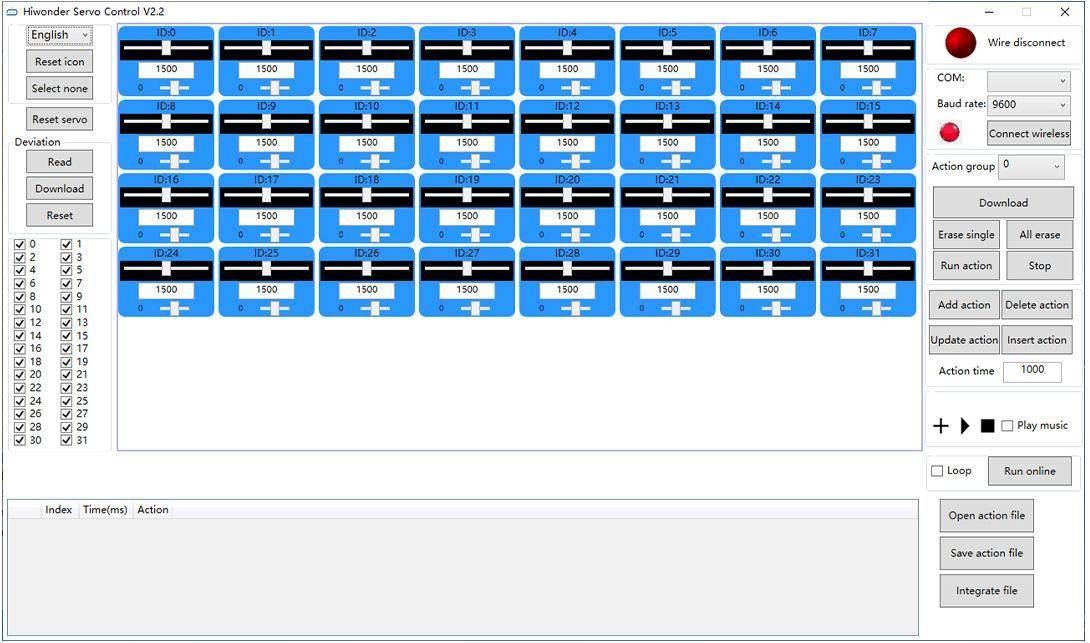
Hiwonder PWM servo control software makes it easy to adjust servo angles, position offsets, and IDs. With this intuitive interface, you can quickly create motion files and debug your servos. The software is driver-free, ensuring a seamless user experience.
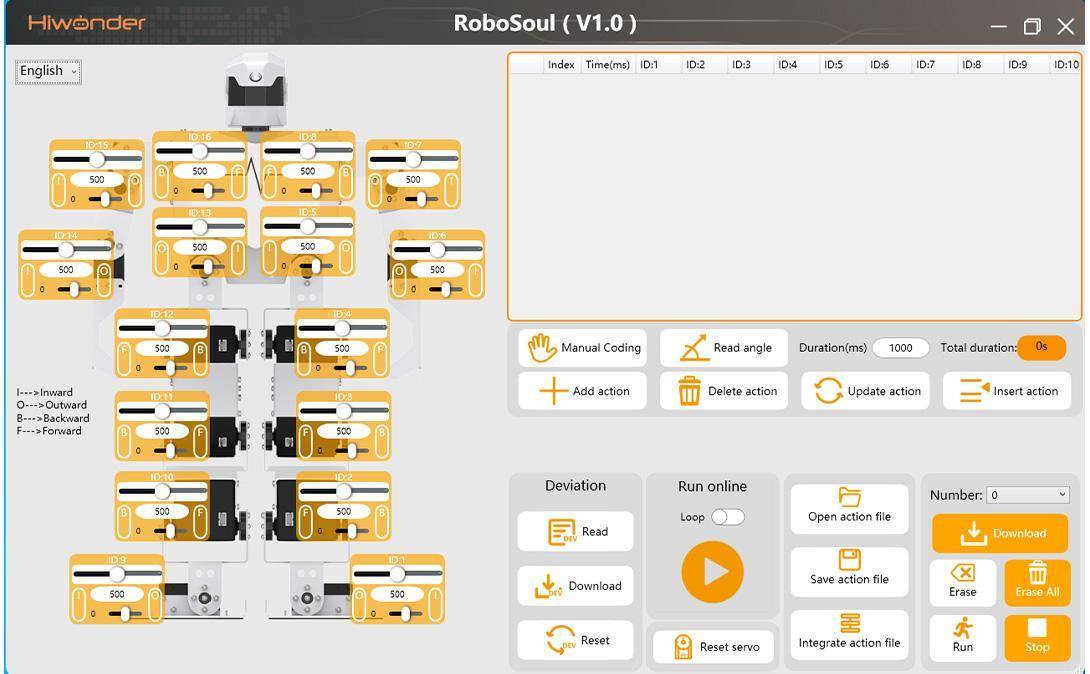
You can accurately debug the servos of your humanoid robot using a user-friendly graphical interface. Once adjustments are complete, the motion data can be saved to the controller via serial or Bluetooth for playback. With support for PS2 controllers and mobile apps, controlling your robot is both easy and flexible.


Our graphical control software for the xArm lets you adjust each servo’s angle quickly and easily. Just drag and drop to create motion files, and you're ready to go.
You can set the endpoint coordinates for each leg, and the robot dog automatically calculates the servo angles using inverse kinematics. This method offers a fast and precise way to debug your robot’s movements.


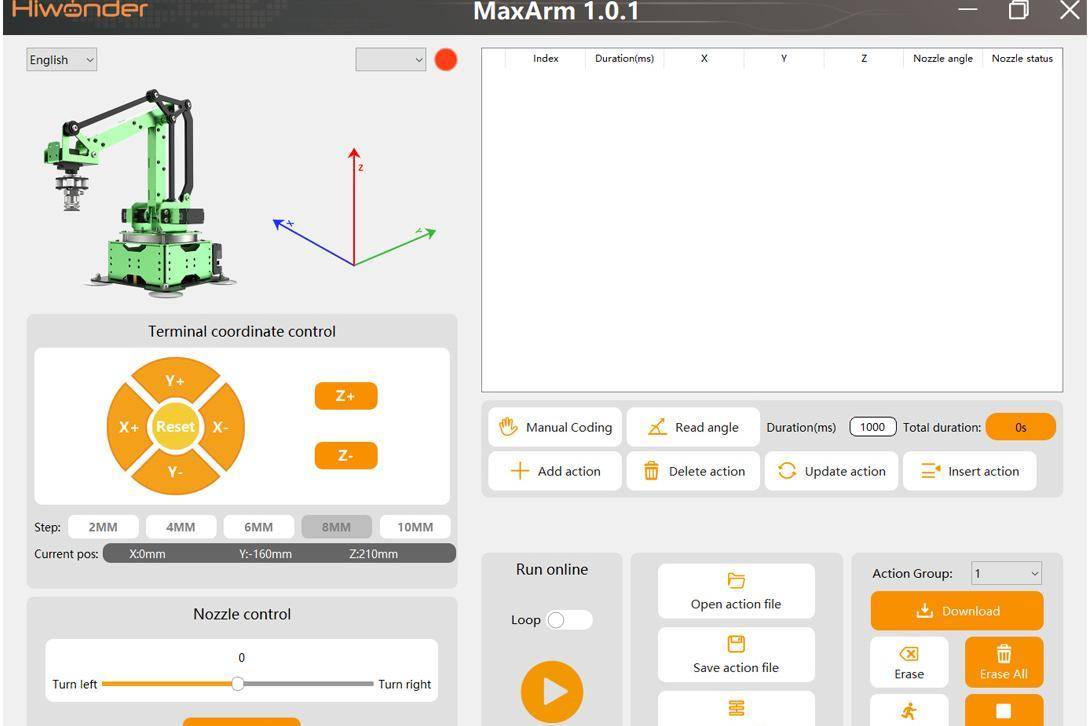
MaxArm's visual debugging tool helps you adjust servo parameters, create action groups, control coordinates, and even manage nozzle function. With an easy-to-use interface, you can quickly copy motion configurations and debug settings, meeting all your robot development needs.